
Abstract
The problems of the vulnerability of the Global Positioning System to jamming and interference and the inadequate performance of eLoran are addressed. A new system, which should satisfy national needs for decades into the future, is defined.
I. Introduction
Satellite navigation aids (GNSS) coupled to receivers and processing systems to extract critical position and time information have become an important part of societies throughout the entire world. Applications of positioning information have introduced new, and extremely accurate methods for surveying, driving, aviation, and weapon delivery.
Timing information supplied by these systems is now essential for communication, the Internet, and, even, automatic teller machines (ATMs). The satellites that produce the signals used for these applications are, of course, limited in the power with which the signals can be transmitted. Further, the signals are distributed uniformly over a large portion of the earth’s surface. The resulting signals are so weak that very special signal configurations and terrestrial signal processing methods are required to make the signal content useful.
The spread spectrum method [1] used to modulate the signals with ranging codes and satellite information is well-developed„ and it performs very well but it has limitations. The result is that while the signal is strong enough for normal uses, the raw, unprocessed signal is very weak, and it is susceptible to interference, both accidental and intentional. Given the critical uses of the signals, signal loss can, and has a few times, result in serious consequences.
Fortunately, as of now, signal interruptions in the United States and Europe have fallen into the categories of individual cases of vandalism or single satellite failures that were undetected, rapidly enough, by users. The possibility remains, however, that much more extensive attempts to disable GNSS could be mounted by individuals, groups, or nations. The effect on a modern society, such as that of the United States (U. S.), or the countries of Europe, could be very damaging to the economy or the safety of citizens. For example, South Korea has experienced large scale jamming that originated in North Korea. Transportation system disruptions have resulted.
Although the work described in this paper applies to all GNSS, The Global Positioning System (GPS) will, in general, be used as an example. It is the oldest and most universally used of the GNSS.d An earlier paper has addressed some of the issues involved [2].
The sudden realization of this long-known fact has created a near panic in some areas. The Federal Aviation Administration (FAA) is casting about for a system that could permit aviation operations to continue as usual if the GPS were not available. They have not, as yet found such a system, and the partial systems they have uncovered are far more expensive, and have less capability, than the GPS. Others have attempted to sway Congress to support the operation and funding of the eLoran system [3], an older technology with limited capabilities and, apparently, no path to improved performance in the future. Europe has, to some extent, accepted eLoran as a suitable GNSS substitute, and some eLoran networks have been established in harbor areas.
While some of the endorsements of eLoran appear to be an honest attempt to find a system that can compensate for GPS shortcomings, others seem to be motivated by personal financial or political, reasons.
Whatever the primary reasons, a statement in the report on the Sentinel project, a GPS jamming study in the United Kingdom (U.K.) expresses a perspective on the eLoran program that sounds accurate [4]:
It is now 36 years since the first Block 1 GPS satellite was launched and nearly 20 years since major telecoms networks started to contemplate using GPS timing. A trans-national commitment to eLoran for a minimum 20-year period would secure reliable and resilient PNT in the long term.
Many proponents of eLoran appear not to recognize the long-term nature of the program. In fact, the rush to install eLoran stations appears to be an almost foolish misunderstanding of the ramifications of the move. The primary justification for the push to adopt eLoran as an alternative to GNSS is:
It is almost as good as the GPS, and it may be good enough.
I argue that good enough is not good enough. The future approaches. The need for capabilities better than the GPS looms, and eLoran technology is a dead end.
I explore below, the possibilities for using present day technology to define a useful system with far less vulnerability to interference and the possibility for improved performance in the future.
II. PNT Standards
It is appropriate to define goals for a national PNT system that will be adequate for, perhaps, a decade to come. The standards are appropriate for both civil and military applications. Proposed standards are shown in Table 1.

eLoran cannot meet these standards, now, or in the future. The GPS would be hard pressed to meet these standards at present, too, but future improvements in the system will make the achievement of the parameters of Table 1. routine.
III. Vulnerability
It has been stated that eLoran is highly invulnerable to jamming. I will accept this assertion as being generally, but not completely, true. There should be attention paid, though, to the possibility that stations and control centers may be vulnerable to kinetic energy, cyber, or microwave attack.
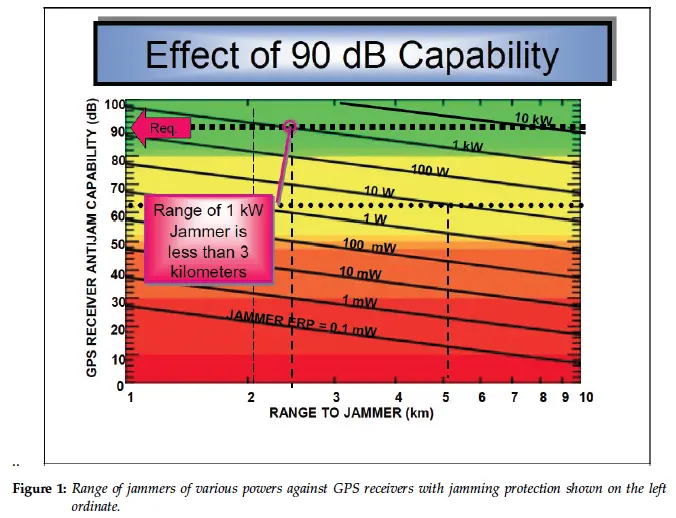
As a definition of the susceptibility of the GPS to jamming, it is convenient to use the chart shown in fig. 1. The chart was taken from a Defense Science Board report on GPS jamming.
In the work, which follows, I will treat, mostly, the signals in the L5 frequency of the GPS. The L5 signals are stronger than that used in the preparation of the chart of fig. 1, and the values along the left ordinate should be reduced by 5.1 dB
In spite of the furor over the susceptibility of the GPS to jamming, no one seems to address the question: How much jamming protection would be required to make a receiver unjammable?
My opinion is that a receiver that can operate properly at a distance of one kilometer from a one-kilowatt jammer deserves the label. For those who maintain that the protection should be more, or less, the discussion below defines the important scaling relations.
IV. Processing gain, Integration time, and Frequency scaling
The GPS signal is detected by matching a replica of the signal, which is known, to the received signal through a correlation process applied for a given time. It can be shown that the longer the correlation time, the less susceptible the receiver is to interference, and the effect is linear. The catch is that the signal, typically, is modulated with a navigation message that conveys important information to the receiver, such as satellite health, clock offset, and ephemeris. The navigation message is transmitted at a frequency of 50 Hz. For the message to be detected, the correlation time must be limited to 20 ms, the message pulse length [5]. The 20 ms correlation time is adequate to discriminate against thermal noise. If the signal bandwidth is given by, B, in Hz, and the correlation time by τ, in seconds, the discrimination factor, D, against interference is given by:
D = Bτ
- Usually, this quantity is expressed in terms of decibels,
D = 10log (Bτ)
- For the L1 channel, which has a bandwidth of 2 MHz, D=46 dB., and for the L5 signal, which has a bandwidth of 20 MHz, D=56 dB. It is seen that if the navigation message could be received from an external source, the correlation time could be increased. The receiver replica signal could be constructed to include the message modulation, and the integration time could, in principle, be increased indefinitely. The practical limit, however, is determined by the requirement for a given accuracy. More about that below.
To resist a kilowatt jammer at one kilometer, it can be seen from fig. 1 that a jamming resistance of 95 dB is needed. That is a factor of 3.16 × 107. For the 20 MHz bandwidth of L5, the integration time required is 158 seconds. However, the signals of the L5 channels are coherent, because their generation is carefully controlled by an atomic clock. Therefore, the powers of the signal add, and the integration time is reduced by a factor of two to 79 seconds. One could argue that the correlations also add to give a further factor of two, but for the moment I will leave the 79 s value as a conservative estimate.
1. Inertial aiding
It is clear that an integration time of 79 s. will produce errors resulting from motion of the receiver. Therefore, it is necessary to add an Inertial measuring unit (IMU) to the receiver to correct motion errors during the correlation time. Low cost Micro-electromechanical inertial sensors (MEMs) will be adequate. The IMU is coupled to the GPS position solution [6], so that, in effect, the IMU guides the correlation of the GPS signal during the integration time, and the IMU is recalibrated every 79 seconds. This process, effectively, gives the jamming protection of a 79 s correlation time with the accuracy of a one second integration time. The current state of development if MEMS units will give an accuracy of, approximately 2 meters, but improvements are being made at a rapid rate, and one meter will be possible within a few years. If high, continuous, time accuracy is needed, an atomic clock on a chip [8] can be added to maintain an accuracy of, approximately, one nanosecond.
To complete the solution of the position problem, other parameters, such as carrier phase must be considered. Most of the remaining effects will improve accuracy.
V. Signal Acquisition
The description of the last section covers the problem of tracking the satellite signal in the presence of interference, but acquiring the signal is another issue. The receiver must be synchronized with the ranging code transmitted by the satellite, but, in addition, there is a Doppler shift in the received frequency that results from the relative motion of the satellite and the receiver. If there is no ab initio knowledge of the receiver location, or its velocity, an attempt must be made to lock to all satellites, one at a time, both in code delay and carrier frequency. In the presence of interference, this process can be very time consuming. If the location of both the receiver and the satellite are known, the acquisition problem is greatly alleviated.
VI. eLoran Assistance
In this and the following sections, I will describe a possible use and modifications to eLoran that will produce what I will call a Universal Position, Navigation, and Timing System (UPNTS). The first considerations must be:
• How do we obtain navigation data when long correlation times are in use?
• How do we reduce acquisition time in the presence of jamming?
For the answers to these questions, I turn to eLoran. Actually, I will describe a modified version of eLoran that I will call mLoran, the m for modified, or modulated, loran. mLoran offers a solution to the problem of deploying a complete, modern, upgradable, PNT system on a reasonable timescale.
1. Acquisition Aid
As noted above, the problem of acquiring a satellite signal is, to a large extent, solved. The Doppler shift is still affected by the receiver motion, but that can be estimated accurately, using the IMU. An eLoran signal can be used to determine the receiver position accurately enough to greatly simplify the problem of determining the order in which space should be searched for satellites.
2. The Navigation Data
The issue remains as to how one obtains the navigation data for the GNSS satellites in the presence of extended correlation time to suppress jamming.
Commercial eLoran receivers are advertised as requiring a maximum of 30 seconds to acquire their position after a cold start [7]. The GPS satellite design has adopted a message packet format consisting of up to 63 messages of length 300 bits each. At a transmission rate of 50 Hz, the 63 messages require a transmission time of 378 seconds. If one transmitted the messages one satellite at a time, 31 satellites would require 195.3 minutes. At a transmission rate of 10 kHz, however, only 58.6 seconds are required.
Therefore, I recommend the following modification to eLoran:
- Beginning at each even numbered minute of universal coordinated time (UTC), all eLoran stations will transmit a standard eLoran signal. The duration of the transmission will be one minute.
- For the following minute, beginning at odd numbered minutes of UTC, the stations will switch to a modulated mode and will transmit the navigation messages of all operating GPS satellites at a rate of 10 kHz. The entire transmission should be complete in one minute, but the segments can be identified to permit partial transmissions over several minutes, if necessary. A small overhead time may be required to accommodate forward error correction. The 10 kHz modulation will fill the entire 20 kHz band around the 100 kHz navigation frequency.
Thus, at the end of the two-minute period the receiver will have acquired its position to an accuracy of 10 meters, or better, and will have acquired the navigation messages of all the GPS satellites. The receiver will continue to track the navigation data in case a navigation message changes.
One the navigation data is in the receiver’s memory; the receiver can determine which satellites to acquire.
3. Obtaining the Data
The mLoran control station can be connected to the GPS control stations and to the mLoran stations by fiber optic links to provide a fast and reliable data transfer path.
It is recommended that the navigation data include the zero age of data ephemeris so that the resulting position solution will have an accuracy of one meter, or better.
A simple geometric study shows that the timing difference for synchronizing the ranging signal to the actual GPS position as compared to the mLoran position will be 6 nanoseconds, or less.
VII. Conclusion
The time for eLoran to be established as a full, if inadequate, backup for the GPS can be measured in decades. However, the time to construct the UPNT system will take no longer than building eLoran in the first place, with an allowance for the providing an adequate number of GPS L5 signals.
The advantage of the UPNT system is that it transforms two systems, one with the inaccuracy of eLoran and one with the vulnerabilities of the GPS, into one system that has neither of those inadequacies.
Some will argue, of course, that the Devil is in the details, but I believe that the basic ideas are sound, and that experienced, and gifted, engineers can define a system that will serve the needs of the United States for years into the future.
References
[1] B.W. Parkinson and J. J. Spilker (editors), Global Positioning System: Theory and Applications, Vol. I, Progress in Astronautics and Aeronautics, vol. 163, AIAA, Washington, D. C., 1996.
[2] G. McCall, GPS Vulnerability: Options and Alternatives, GHM-6-2015-1, June, 2015.
[3] House Resolution 1678, 114th Congress, (2005-2006).
[4] C. Curry, SENTINEL PROJECT–Project Report 001, 4 April 2014. , 4 April 2014.
[5] Grewal, M. e. a. (2001). Global Positioning Systems, Inertial Navigation, and Integration. John Wiley and Sons, New York, USA.
[6] Y. Tawk, et al, Implementation and Performance of a GPS/INS Tight;y Coupled Assisted PLL Architecture Using MEMS Inertial Sensors, Sensors 2014, 14, 5168, 2014.
* Dr. Gene H. McCall is an Affiliate Research Professor, Desert Research Institute, Reno Nevada. He completed an assignment as the Chief Scientist with Air Force Space Command at Peterson Air Force Base, Colo. Dr. McCall’s areas of expertise are: Lasers, laser-matter interactions, non-linear optics, nuclear weapon science and technology, Plasma physics, Z-pinch physics. explosive modeling and applications, positioning and timing systems, satellite navigation, aircraft navigation and landing systems, weapon systems. He has now retired from Los Alamos National Laboratory as a Laboratory Fellow and can be reached at ghm7723@gmail.com